
|
Hearken to this text  |
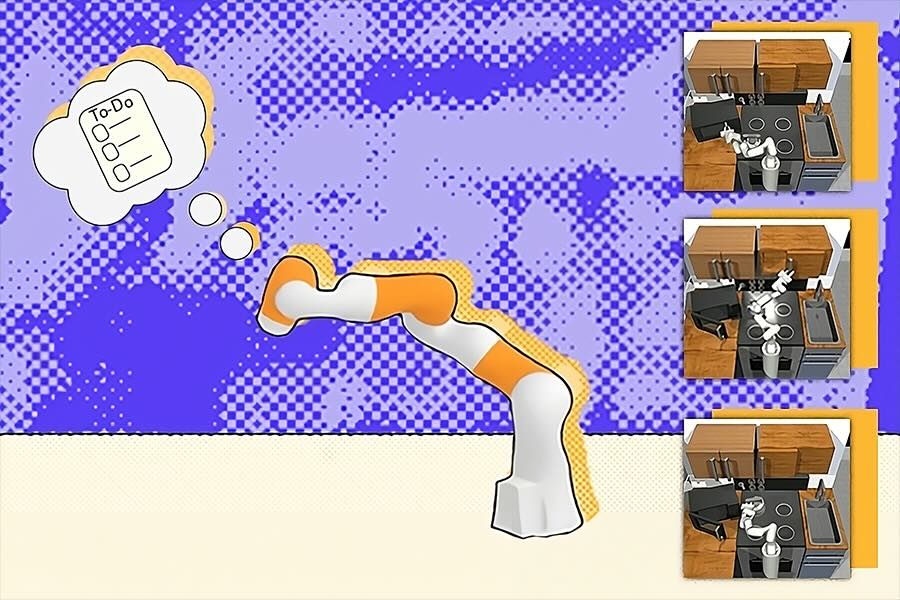
The HiP framework develops detailed plans for robots utilizing the experience of three completely different basis fashions, serving to it execute duties in households, factories, and development that require a number of steps. | Credit score: Alex Shipps/MIT CSAIL
Your every day to-do checklist is probably going fairly easy: wash the dishes, purchase groceries, and different trivialities. It’s unlikely you wrote out “choose up the primary soiled dish,” or “wash that plate with a sponge,” as a result of every of those miniature steps throughout the chore feels intuitive. Whereas we will routinely full every step with out a lot thought, a robotic requires a fancy plan that includes extra detailed outlines.
MIT’s Inconceivable AI Lab, a gaggle throughout the Pc Science and Synthetic Intelligence Laboratory (CSAIL), has supplied these machines a serving to hand with a brand new multimodal framework: Compositional Basis Fashions for Hierarchical Planning (HiP), which develops detailed, possible plans with the experience of three completely different basis fashions. Like OpenAI’s GPT-4, the muse mannequin that ChatGPT and Bing Chat have been constructed upon, these basis fashions are skilled on large portions of information for functions like producing photos, translating textual content, and robotics.
Not like RT2 and different multimodal fashions which can be skilled on paired imaginative and prescient, language, and motion knowledge, HiP makes use of three completely different basis fashions every skilled on completely different knowledge modalities. Every basis mannequin captures a special a part of the decision-making course of after which works collectively when it’s time to make selections. HiP removes the necessity for entry to paired imaginative and prescient, language, and motion knowledge, which is tough to acquire. HiP additionally makes the reasoning course of extra clear.
What’s thought of a every day chore for a human is usually a robotic’s “long-horizon purpose” — an overarching goal that includes finishing many smaller steps first — requiring enough knowledge to plan, perceive, and execute aims. Whereas laptop imaginative and prescient researchers have tried to construct monolithic basis fashions for this downside, pairing language, visible, and motion knowledge is dear. As an alternative, HiP represents a special, multimodal recipe: a trio that cheaply incorporates linguistic, bodily, and environmental intelligence right into a robotic.
 Submit your nominations for innovation awards within the 2024 RBR50 awards.
Submit your nominations for innovation awards within the 2024 RBR50 awards.
“Basis fashions would not have to be monolithic,” stated NVIDIA AI researcher Jim Fan, who was not concerned in the paper. “This work decomposes the complicated job of embodied agent planning into three constituent fashions: a language reasoner, a visible world mannequin, and an motion planner. It makes a tough decision-making downside extra tractable and clear.”
The workforce believes that their AI system may assist these machines accomplish family chores, resembling placing away a e book or putting a bowl within the dishwasher. Moreover, HiP may help with multistep development and manufacturing duties, like stacking and putting completely different supplies in particular sequences.
Evaluating HiP
The CSAIL workforce examined HiP’s acuity on three manipulation duties, outperforming comparable frameworks. The system reasoned by growing clever plans that adapt to new data.
First, the researchers requested that it stack different-colored blocks on one another after which place others close by. The catch: A number of the appropriate colours weren’t current, so the robotic needed to place white blocks in a shade bowl to color them. HiP typically adjusted to those adjustments precisely, particularly in comparison with state-of-the-art job planning methods like Transformer BC and Motion Diffuser, by adjusting its plans to stack and place every sq. as wanted.
One other check: arranging objects resembling sweet and a hammer in a brown field whereas ignoring different gadgets. A number of the objects it wanted to maneuver have been soiled, so HiP adjusted its plans to put them in a cleansing field, after which into the brown container. In a 3rd demonstration, the bot was capable of ignore pointless objects to finish kitchen sub-goals resembling opening a microwave, clearing a kettle out of the best way, and turning on a lightweight. A number of the prompted steps had already been accomplished, so the robotic tailored by skipping these instructions.
A 3-pronged hierarchy
HiP’s three-pronged planning course of operates as a hierarchy, with the flexibility to pre-train every of its elements on completely different units of information, together with data outdoors of robotics. On the backside of that order is a big language mannequin (LLM), which begins to ideate by capturing all of the symbolic data wanted and growing an summary job plan. Making use of the widespread sense information it finds on the web, the mannequin breaks its goal into sub-goals. For instance, “making a cup of tea” turns into “filling a pot with water,” “boiling the pot,” and the next actions required.
“All we need to do is take present pre-trained fashions and have them efficiently interface with one another,” says Anurag Ajay, a PhD scholar within the MIT Division of Electrical Engineering and Pc Science (EECS) and a CSAIL affiliate. “As an alternative of pushing for one mannequin to do all the things, we mix a number of ones that leverage completely different modalities of web knowledge. When utilized in tandem, they assist with robotic decision-making and might doubtlessly assist with duties in houses, factories, and development websites.”
These AI fashions additionally want some type of “eyes” to grasp the atmosphere they’re working in and accurately execute every sub-goal. The workforce used a big video diffusion mannequin to reinforce the preliminary planning accomplished by the LLM, which collects geometric and bodily details about the world from footage on the web. In flip, the video mannequin generates an remark trajectory plan, refining the LLM’s define to include new bodily information.
This course of, often known as iterative refinement, permits HiP to motive about its concepts, taking in suggestions at every stage to generate a extra sensible define. The circulate of suggestions is just like writing an article, the place an creator could ship their draft to an editor, and with these revisions included in, the writer opinions for any final adjustments and finalizes.
On this case, the highest of the hierarchy is an selfish motion mannequin, or a sequence of first-person photos that infer which actions ought to happen based mostly on its environment. Throughout this stage, the remark plan from the video mannequin is mapped over the area seen to the robotic, serving to the machine resolve the way to execute every job throughout the long-horizon purpose. If a robotic makes use of HiP to make tea, this implies it is going to have mapped out precisely the place the pot, sink, and different key visible components are, and start finishing every sub-goal.
Nonetheless, the multimodal AI work is proscribed by the shortage of high-quality video basis fashions. As soon as accessible, they may interface with HiP’s small-scale video fashions to additional improve visible sequence prediction and robotic motion technology. The next-quality model would additionally cut back the present knowledge necessities of the video fashions.
That being stated, the CSAIL workforce’s strategy solely used a tiny bit of information total. Furthermore, HiP was low-cost to coach and demonstrated the potential of utilizing available basis fashions to finish long-horizon duties.
“What Anurag has demonstrated is proof-of-concept of how we will take fashions skilled on separate duties and knowledge modalities and mix them into fashions for robotic planning. Sooner or later, HiP could possibly be augmented with pre-trained fashions that may course of contact and sound to make higher plans,” stated senior creator Pulkit Agrawal, MIT assistant professor in EECS and director of the Inconceivable AI Lab. The group can also be contemplating making use of HiP to fixing real-world long-horizon duties in robotics.
Editor’s Word: This text was republished from MIT Information.

OnePlus Bullets Z2 Bluetooth Wireless in Ear Earphones with Mic, Bombastic Bass - 12.4 Mm Drivers, 10 Mins Charge - 20 Hrs Music, 30 Hrs Battery Life (Magico Black)
₹1,499.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
HONOR 90 (Midnight Black, 12GB + 512GB) | India's First Eye Risk-Free Display | 200MP Main & 50MP Selfie Camera | Segment First Quad-Curved AMOLED Screen | Without Charger
₹30,999.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
OnePlus Nord CE 3 Lite 5G (Pastel Lime, 8GB RAM, 128GB Storage)
₹19,998.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Redmi Note 13 5G (Stealth Black, 8GB RAM, 256GB Storage) | MTK Dimensity 6080 5G | 7.6mm, Slimmest Note Ever
₹19,999.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
OnePlus Nord CE 3 5G (Aqua Surge, 12GB RAM, 256GB Storage)
₹27,999.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Logitech B170 Wireless Mouse, 2.4 GHz with USB Nano Receiver, Optical Tracking, 12-Months Battery Life, Ambidextrous, PC/Mac/Laptop - Black
₹449.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
E-COSMOS 5V 1.2W Portable Flexible USB LED Light (Colours May Vary, Small, EC-POF1, Plastic)
₹39.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Toysbuddy Re-Writable LCD Writing Tablet Pad with Screen 21.5cm (8.5Inch) for Drawing, Playing, Handwriting Best Birthday Gifts for Adults & Kids Girls Boys, Multicolor
₹97.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Ambrane Unbreakable 60W / 3A Fast Charging 1.5m Braided Type C Cable for Smartphones, Tablets, Laptops & other Type C devices, PD Technology, 480Mbps Data Sync, Quick Charge 3.0 (RCT15A, Black)
₹99.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Lenovo 15.6" (39.62cm) Slim Everyday Backpack, Made in India, Compact, Water-resistant, Organized storage:Laptop sleeve,tablet pocket,front workstation,2-side pockets,Padded adjustable shoulder straps
₹399.00 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Seagate Storage Expansion Card 2TB Solid State Drive - NVMe SSD for Xbox Series X|S, Quick Resume, Plug & Play, Licensed (STJR2000400)
$279.99 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
ARCTIC MX-4 (incl. Spatula, 4 g) - Premium Performance Thermal Paste for all processors (CPU, GPU - PC, PS4, XBOX), very high thermal conductivity, long durability, safe application, CPU Thermal Paste
$8.49 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
WD 5TB Elements Portable HDD, External Hard Drive, USB 3.0 for PC & Mac, Plug and Play Ready - WDBU6Y0050BBK-WESN
$117.03 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
MSI Gaming GeForce RTX 3060 12GB 15 Gbps GDRR6 192-Bit HDMI/DP PCIe 4 Torx Twin Fan Ampere OC Graphics Card
$289.39 (as of January 15, 2024 07:26 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)