
|
Hearken to this text  |
A analysis challenge led by USC laptop science pupil Sumedh A. Sontakke needs to open the door for robots to be caregivers for growing older populations. The workforce claims the RoboCLIP algorithm, developed with assist from Professor Erdem Biyik and Professor Laurent Itti, permits robots to carry out new duties after only one demonstration.
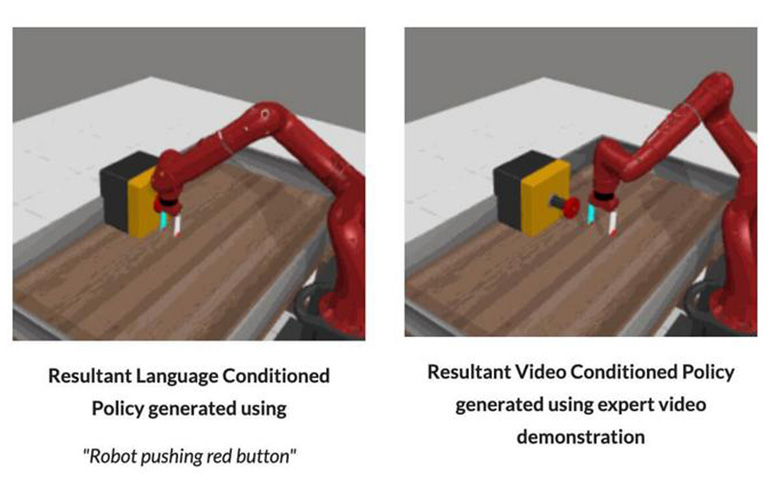
RoboCLIP solely must see one video or textual demonstration of a process for it to carry out the duty two or 3 times higher than different imitation studying (IL) fashions, the workforce claimed.
“To me, essentially the most spectacular factor about RoboCLIP is with the ability to make our robots do one thing primarily based on just one video demonstration or one language description,” stated Biyik, a roboticist who joined USC Viterbi’s Thomas Lord Division of Laptop Science in August 2023 and leads the Studying and Interactive Robotic Autonomy Lab (Lira Lab).
The challenge began two years in the past when Sontakke realized how a lot information is required to have robots carry out fundamental family duties.
“I began desirous about family duties like opening doorways and cupboards,” Sontakke stated. “I didn’t like how a lot information I wanted to gather earlier than I might get the robotic to efficiently do the duty I cared about. I wished to keep away from that, and that’s the place this challenge got here from.”
How does RoboCLIP work?
Most IL fashions learn to full duties by trial and error. The robotic performs the duty over and over to get a reward when it lastly completes the duty. Whereas this may be efficient, it requires large quantities of time, information, and human supervision to get the robotic to efficiently carry out a brand new process.
“The massive quantity of information presently required to get a robotic to efficiently do the duty you need it to do isn’t possible in the true world, the place you need robots that may study rapidly with few demonstrations,” Sontakke stated in a launch.
RoboCLIP works in another way than typical IL fashions, because it incorporates the newest advances in generative AI and video-language fashions (VLMs). These programs are pre-trained on giant quantities of video and textual demonstrations, in keeping with Biyik.
The researchers claimed RoboCLIP performs effectively out of the field to carry out family duties, like opening and shutting drawers or cupboards.
“The important thing innovation right here is utilizing the VLM to critically ‘observe’ simulations of the digital robotic babbling round whereas attempting to carry out the duty, till in some unspecified time in the future it begins getting it proper – at that time, the VLM will acknowledge that progress and reward the digital robotic to maintain attempting on this route,” Itti stated.
In accordance with Itti, the VLM can inform it’s getting nearer to success when the textual description it creates observing the robotic comes nearer to what the consumer needs.
“This new type of closed-loop interplay may be very thrilling to me and can seemingly have many extra future functions in different domains,” Itti stated.
 Submit your nominations for innovation awards within the 2024 RBR50 awards.
Submit your nominations for innovation awards within the 2024 RBR50 awards.
What’s subsequent?
Sontakke hopes that this system might sometime assist robots take care of growing older populations, or result in different functions that would assist anybody. The workforce says that future analysis will probably be obligatory earlier than the system is able to tackle the true world.
The paper, titled RoboCLIP: One Demonstration is Sufficient to Be taught Robotic Insurance policies, was offered by Sontakke on the thirty seventh Convention on Neural Info Processing Techniques (NeurIPS), Dec. 10-16 in New Orleans.
Collaborating with Sontakke, Biyik and Itti on the RoboCLIP paper have been two USC Viterbi graduates, Sebastien M.R. Arnold, now at Google Analysis, and Karl Pertsch, now at UC Berkeley and Stanford College. Jesse Zhang, a fourth-year Ph.D. candidate in laptop sciences at USC Viterbi, additionally labored on the RoboCLIP challenge.

OnePlus Nord CE 3 5G (Aqua Surge, 12GB RAM, 256GB Storage)
₹27,999.00 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Samsung Galaxy M34 5G (Prism Silver,6GB,128GB)|120Hz sAMOLED Display|50MP Triple No Shake Cam|6000 mAh Battery|4 Gen OS Upgrade & 5 Year Security Update|12GB RAM with RAM+|Android 13|Without Charger
₹16,499.00 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Redmi 13C (Starshine Green, 8GB RAM, 256GB Storage) | 90Hz Display | 50MP AI Triple Camera
₹11,499.00 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
OnePlus Bullets Z2 Bluetooth Wireless in Ear Earphones with Mic, Bombastic Bass, 10 Mins Charge - 20 Hrs Music, 30 Hrs Battery Life (Acoustic Red)
₹1,499.00 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
URBN Type-C USB 3.4 Amp | 25W Fast Charging Cable for Smartphone | Unbreakable Rugged & Nylon Braided | Quick Charge (QC) Compatible | Made in India | Length (5 Feet) - Black (Pack of 2)
(as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
STRIFF Adjustable Laptop Tabletop Stand Patented Riser Ventilated Portable Foldable Compatible with MacBook Notebook Tablet Tray Desk Table Book with Free Phone Stand (Black)
₹299.00 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
TP-Link AC750 Wifi Range Extender | Up to 750Mbps | Dual Band WiFi Extender, Repeater, Wifi Signal Booster, Access Point| Easy Set-Up | Extends Wifi to Smart Home & Alexa Devices (RE200)
₹1,799.00 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Portronics Toad One Bluetooth Mouse with 2.4 GHz & BT 5.3 Dual Wireless, 6 Buttons, Rechargeable, RGB Lights, Connect 3 Devices, Ergonomic Design for Laptop, Smartphone, Tablet (Black)
₹569.00 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Sounce Fast Phone Charging Cable & Data Sync USB Cable Compatible for iPhone 13, 12,11, X, 8, 7, 6, 5, iPad Air, Pro, Mini & iOS Devices
₹199.00 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Lenovo 15.6" (39.62cm) Slim Everyday Backpack, Made in India, Compact, Water-resistant, Organized storage:Laptop sleeve,tablet pocket,front workstation,2-side pockets,Padded adjustable shoulder straps
₹399.00 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
AMD Ryzen 7 7800X3D 8-Core, 16-Thread Desktop Processor
$350.19 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
ARCTIC MX-6 (4 g, incl. 6 MX Cleaner) - Ultimate Performance Thermal Paste for CPU, Consoles, Graphics Cards, laptops, Very high Thermal Conductivity, Long Durability, Non-Conductive, CPU Thermal
$8.99 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
SAMSUNG SSD T7 Portable External Solid State Drive 2TB, USB 3.2 Gen 2, Reliable Storage for Gaming, Students, Professionals, MU-PC2T0R/AM, Red
$129.26 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Toshiba Canvio Basics 2TB Portable External Hard Drive USB 3.0, Black - HDTB520XK3AA
$61.89 (as of December 16, 2023 00:20 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)